A $2,500 humanoid robot leg platform uses 3D-printed parts and off-the-shelf components to support physical experiments for AI-powered robotics. The LeRobot Humanoid project from Hugging Face provides a full-stack release including a bill of materials, 3D-printable files, wiring documentation, and assembly instructions. It also includes software tools for calibrating and controlling the robot in both the physical body and in simulation. The goal is a practical balance between affordability, mechanical performance, and assembly ease, enabling rapid fixes and modifications rather than one-off demos. The platform supports a reproducible design loop where simulation designs are validated physically, and real-world data improves simulation training for robot behaviors.
"“If you are looking for the most advanced humanoid robot, this is not it,” according to Virgile Batto, a robotics engineer at Hugging Face, in a blog post coauthored with other colleagues. “If you are looking for a humanoid you can build, understand, repair, instrument, simulate, and use for learning experiments, this is the robot we are trying to make.”"
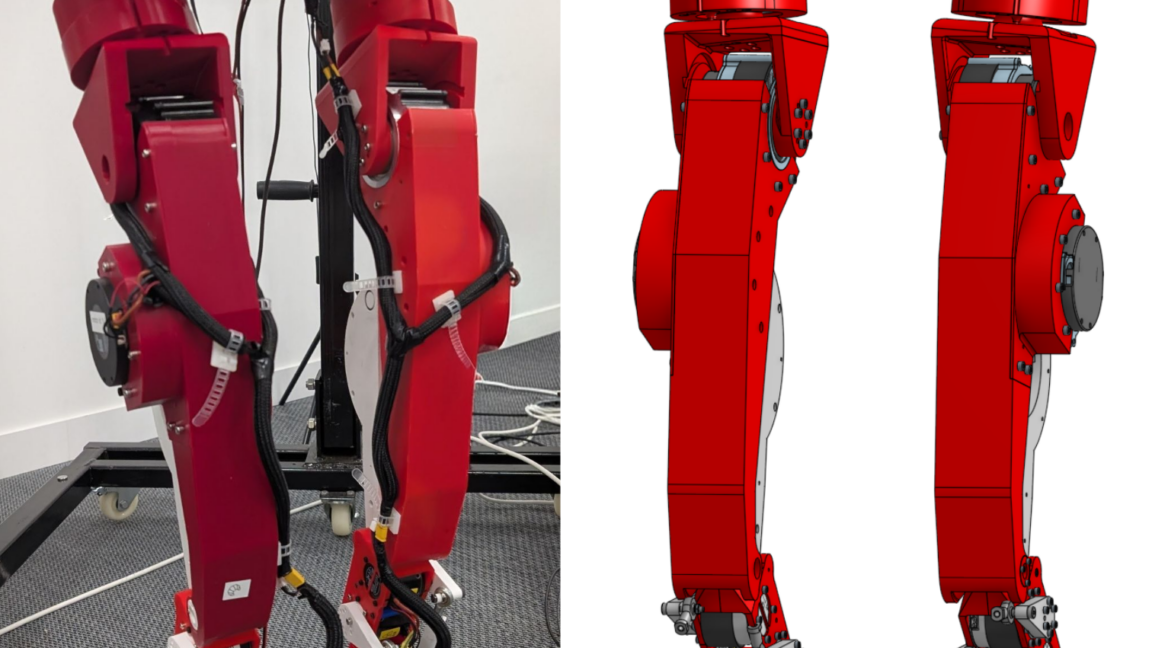
"The Hugging Face team aimed for a “practical balance between affordability, mechanical performance, and ease of assembly.” The design, built around printable parts, off-the-shelf hardware, and affordable actuators and electronics, means the bipedal robotic platform can be easily fixed and modified to enable rapid experimentation and development, rather than being a “one-off prototype useful for a demo.”"
"Such a design also aims to enable a more reproducible “full-robot design loop” in which robots designed in simulation can be tested and validated in physical body experiments, according to Batto and colleagues. In turn, data from the real-world trials can help inform and improve the simulations used for training robot behaviors."
Read at Ars Technica
Unable to calculate read time
Collection
[
|
...
]