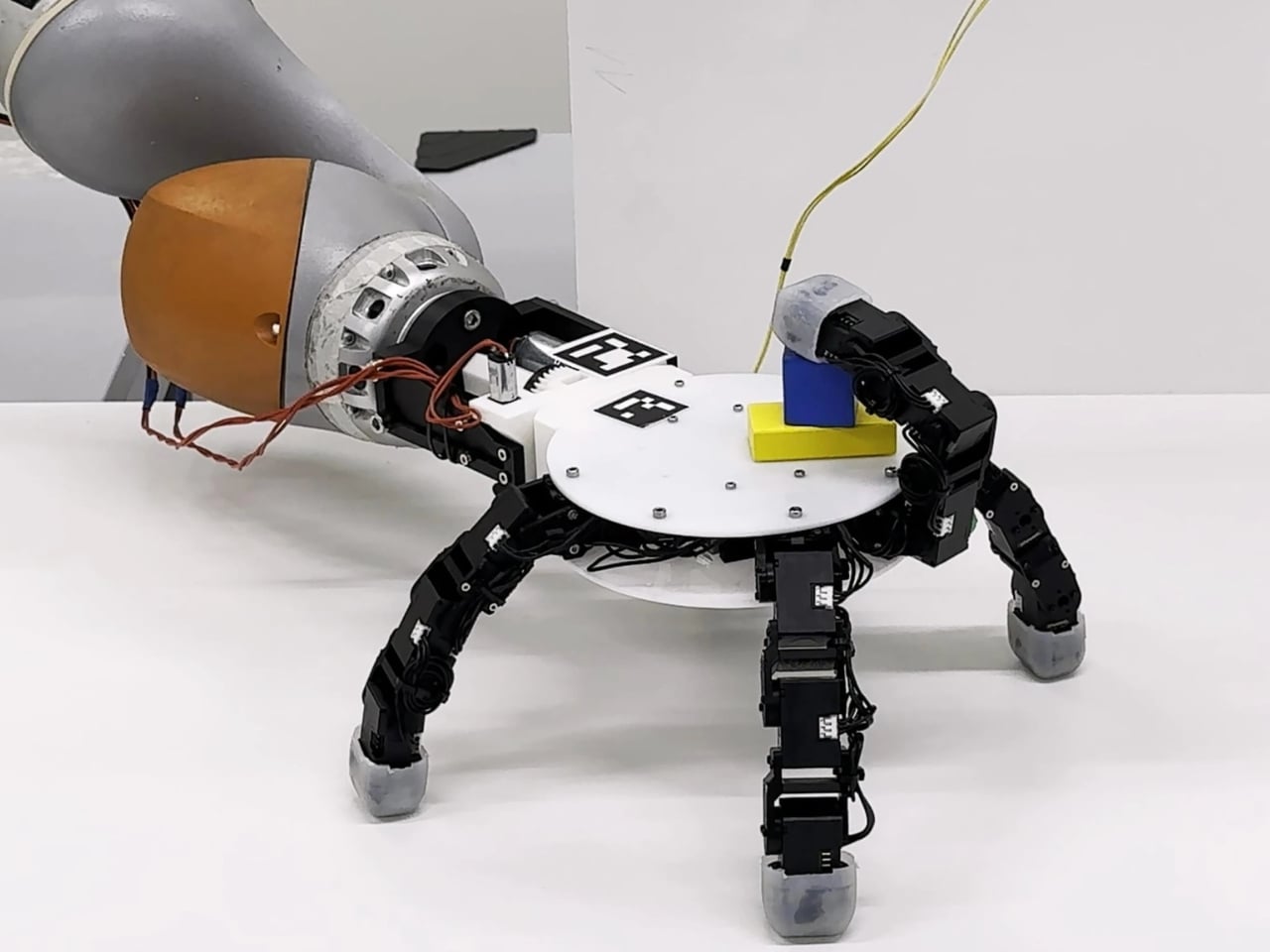
"Imagine a robotic hand that not only mimics human dexterity but completely reimagines what a hand can do. Researchers at École Polytechnique Fédérale de Lausanne (EPFL) have developed something that looks like it crawled straight out of a sci-fi fever dream: a modular robotic hand that can detach from its arm, scuttle across surfaces spider-style, and grab multiple objects at once."
"The team at EPFL, led by Aude Billard from the Learning Algorithms and Systems Laboratory, decided to throw the rulebook out the window. Instead of copying human anatomy, they created something better: a symmetrical hand that features up to six identical fingers, each tipped with silicone for grip. The genius lies in the design, where any combination of fingers can form opposing pairs for pinching and grasping. No single designated thumb here."
"But wait, it gets wilder. The hand is completely reversible, meaning the palm and back are interchangeable. Flip it over, and it works just as effectively from either side. This eliminates the need for awkward repositioning and opens up grasping possibilities that humans simply can't achieve. The device can perform 33 different types of human grasping motions, and thanks to its modular design, it can hold multiple objects simultaneously with fewer fingers than we'd need."
A modular robotic hand detaches from its arm and scuttles across surfaces like a spider, enabling mobile manipulation. The hand uses a symmetrical layout with up to six identical silicone-tipped fingers that can pair in any combination for pinching and grasping. The palm and back are interchangeable, allowing reversible operation and eliminating awkward repositioning. The design accomplishes 33 types of human grasping motions and can hold multiple objects simultaneously using fewer fingers. The symmetrical, modular architecture removes thumb-specific constraints and expands reachable configurations beyond those of biological human hands.
Read at Yanko Design - Modern Industrial Design News
Unable to calculate read time
Collection
[
|
...
]