Mechanical transmission supports many force-related activities ranging from daily tasks to advanced surgical and robotic procedures. Electronic force-sensing devices perform poorly in constrained or resource-limited environments such as minimally invasive surgeries and off-grid operations. Surgeons often estimate tension visually through tissue deformation due to impractical sensing systems. A slipknot-gauged mechanical transmission encodes force through knot-tying with a predefined tensile force Ftying, which alters contact, friction and elastic deformation. Applying forces to free ends produces topology-preserving movement and final opening, generating a sequence of measurable peak forces Fpeak. Analysis of slipknot elastic deformation enables quantification of Fpeak. The approach shows robustness in microrobotic and industrial evaluations.
"Mechanical transmission is integral to a wide range of force-related activities, from daily tasks to advanced surgical and robotic procedures1,2,3,4,5. Despite their importance, electronic force-sensing devices face challenges in environments with constrained space or limited resources, such as minimally invasive surgeries and off-grid operations6, respectively. In surgical practice, explicit measurements of tension remain difficult, as sensing systems are often impractical to implement. Consequently, surgeons typically rely on visual estimation based on the degree of tissue deformation rather than on quantitative assessments7."
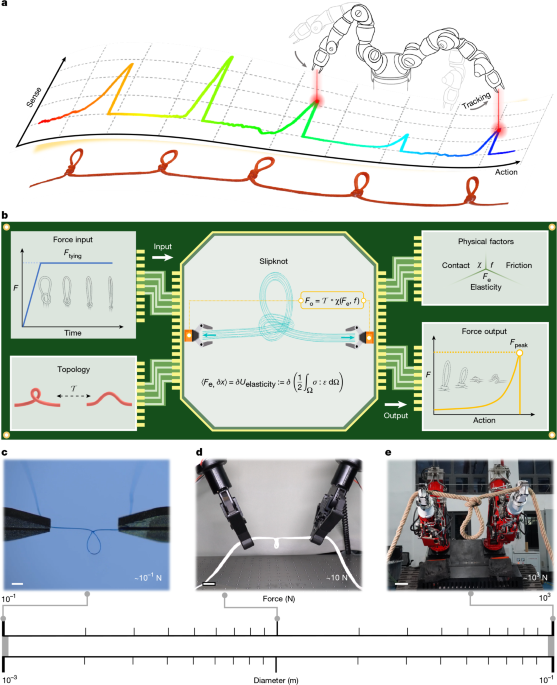
"To overcome such challenges, here we propose a slipknot-gauged mechanical transmission strategy that enables intelligent control for both human and robotic systems (Fig. 1a). Although topologically equivalent to trivial knots8, the slipknot possesses distinct geometric and mechanical properties. Specifically, during its deployment, a sequence of peak force signals, denoted as Fpeak, can be transmitted to the robot arm and human hand."
"Each slipknot is fabricated through a knot-tying process, whereby a pair of tensile forces are imposed on the string until a predefined value, denoted as Ftying, is reached (Fig. 1b, top left). This predefined tensile force can affect contact9,10, friction11 and elastic deformation12,13 of the slipknot system (Fig. 1b, top right). To transmit the encoded force, a pair of forces are imposed on the free ends of the string (Fig. 1b, middle), which leads to a topology-preserving movement (Fig. 1b, bottom left)"
#slipknot-based-force-encoding #mechanical-force-sensing #minimally-invasive-surgery #robotic-control
Read at Nature
Unable to calculate read time
Collection
[
|
...
]