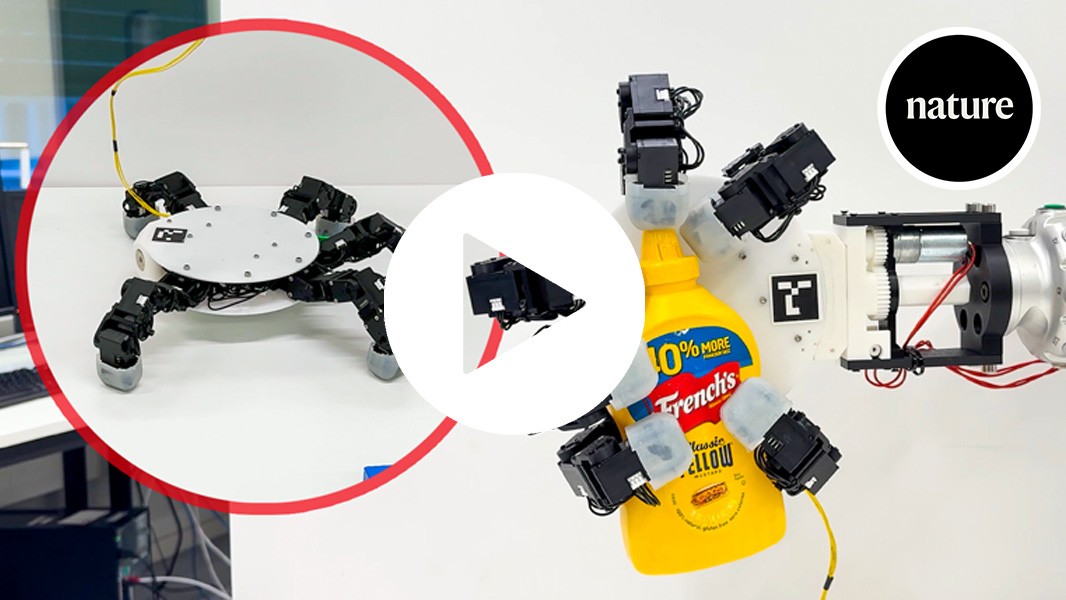
"Human hands are incredibly dexterous tools - but they have their limits. They are asymmetric, they have only a single thumb and, fundamentally, they're connected to our arms. But none of that poses a problem for this robot claw. Its symmetrical design means it can seamlessly approach different tasks without having to twist to find the right angle, six-fingers mean the design can juggle multiple objects at the same time and, if needed, it can simply leave its arm behind, perfect for dangerous or hard to reach places."
"Its symmetrical design means it can seamlessly approach different tasks without having to twist to find the right angle, six-fingers mean the design can juggle multiple objects at the same time and, if needed, it can simply leave its arm behind, perfect for dangerous or hard to reach places."
The robot claw uses a symmetrical, six-fingered design to overcome limitations of human hands. Symmetry allows approach to tasks without twisting to find the right angle. Six fingers enable simultaneous manipulation and juggling of multiple objects. The claw can detach from an arm, allowing the hand to remain in place while the manipulator leaves, which suits dangerous or hard-to-reach environments. The design removes constraints of human asymmetry and single-thumb topology. The claw provides flexible task handling and safer deployment in hazardous settings. The modularity supports applications where leaving the arm behind is advantageous.
Read at Nature
Unable to calculate read time
Collection
[
|
...
]