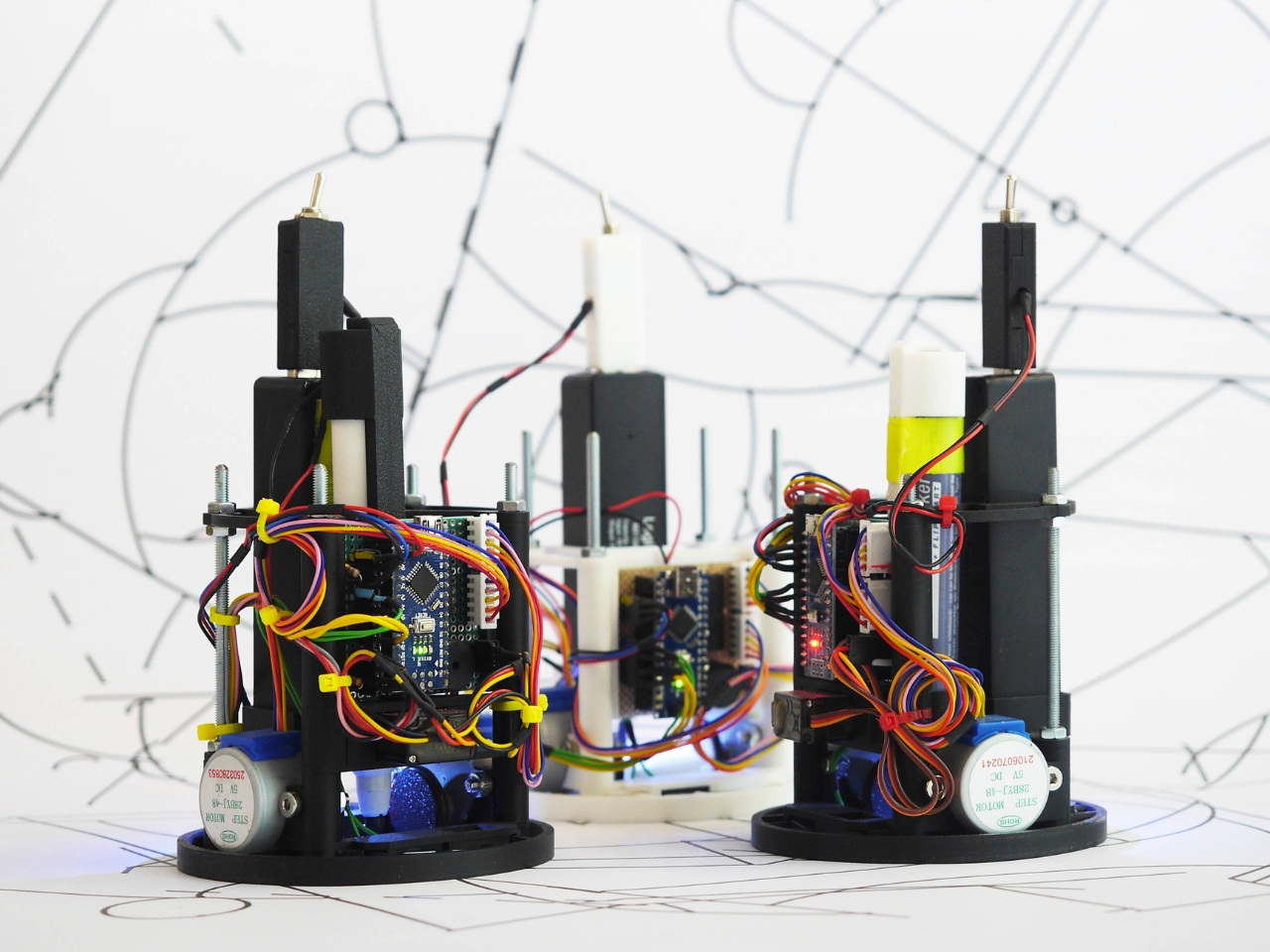
"Imagine a robot built from 3D-printed parts, tiny motors, and an ordinary marker pen. Each robot is compact and low-cost, driven by two stepper motors with O-rings for wheels and an Arduino Nano as its brain. The pen sits at the center, ready to draw as the robot carefully moves across a whiteboard or a sheet of paper. Early versions moved slowly and carefully drew lines, but the design kept evolving."
"Some versions use bumpers and switches to detect the edge of the drawing surface or bump into other robots, while others use a light sensor to spot lines already drawn. This lets the robots not only draw but also respond to their environment. For example, when a robot crosses a line, it can lift or lower its pen, creating breaks that add depth and visual interest to the piece."
The project builds compact, low-cost drawing robots from 3D-printed parts, tiny motors, O-ring wheels, and an Arduino Nano driving two stepper motors. A marker pen sits at the center so the robot can draw on whiteboards or paper. Design changes moved the wheels closer to the pen to enable faster spins and turns at the cost of some orientation precision. Robots maintain position and heading using basic trigonometry without external references. Variants use bumpers, switches, or light sensors to detect edges, other robots, or existing lines, enabling interactive behaviors such as lifting or lowering the pen to create layered visual effects. The results connect generative robotics to perceptual principles like grouping, continuity, and figure-ground separation.
Read at Yanko Design - Modern Industrial Design News
Unable to calculate read time
Collection
[
|
...
]