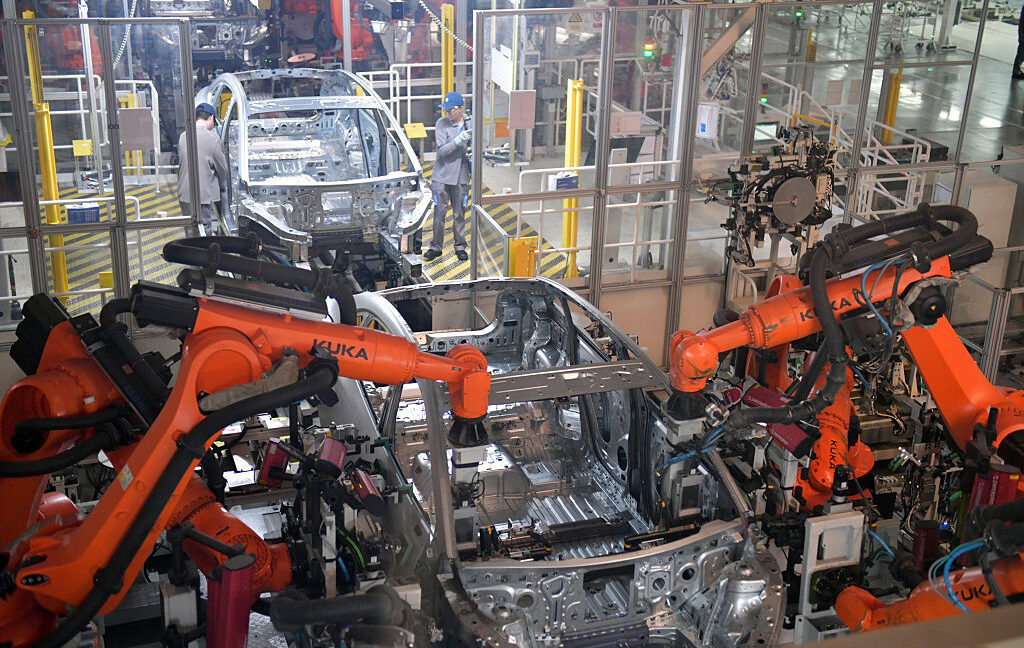
"A lot of the stuff we use today is largely made by robots-arms with multiple degrees of freedom positioned along conveyor belts that move in a spectacle of precisely synchronized motions. All this motion is usually programmed by hand, which can take hundreds to thousands of hours. Google's DeepMind team has developed an AI system called RoboBallet that lets manufacturing robots figure out what to do on their own."
"Planning what manufacturing robots should do to get their jobs done efficiently is really hard to automate. You need to solve both task allocation and scheduling-deciding which task should be done by which robot in what order. It's like the famous traveling salesman problem on steroids. On top of that, there is the question of motion planning; you need to make sure all these robotic arms won't collide with each other, or with all the gear standing around them."
"Lai's team started by generating simulated samples of what are called work cells, areas where teams of robots perform their tasks on a product being manufactured. The work cells contained something called a workpiece, a product on which the robots do work, in this case something to be constructed of aluminum struts placed on a table. Around the table, there were up to eight randomly placed Franka Panda robotic arms, each with seven degrees of freedom, that were supposed to complete up to 40 tasks on a workpiece."
RoboBallet is an AI system that automates coordination of multiple industrial robot arms by jointly solving task allocation, scheduling, and motion planning. Manual programming of synchronized robot motions can take hundreds to thousands of hours, and RoboBallet aims to reduce that burden. The system trains on simulated work cells containing a workpiece built from aluminum struts and up to eight Franka Panda robotic arms with seven degrees of freedom. Simulations include up to 40 tasks per workpiece and require planning to avoid collisions and ensure each arm reaches required positions while completing assigned tasks efficiently.
Read at Ars Technica
Unable to calculate read time
Collection
[
|
...
]